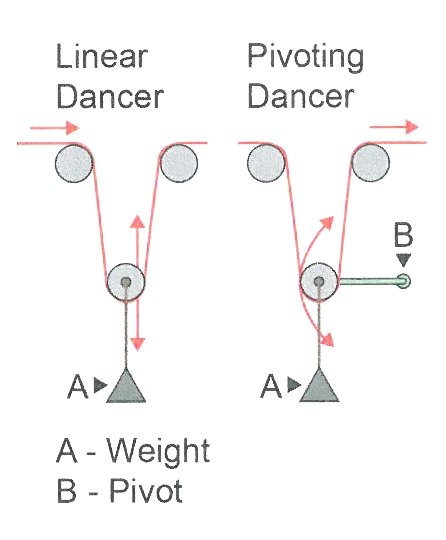
سیستم نورد رقصنده (Dancer Roller system)
نیروی مخالفی که توسط یک وزنه یا سیلندر هوا ایجاد می شود در تقابل با نیروی کشش قرار می گیرد و یک حسگر به رقصنده وصل است تا موقعیت آن را شناسایی کرده و تشخیص دهد. سیگنال موقعیت به رگولاتور منتقل شده و سپس با سیگنال موقعیت مطلوب مقایسه می شود. موقعیت مطلوب معمولا نشانگر نصف مسیری است که رقصنده می پیماید و اپراتور ماشین آن را تعیین کرده است. از لحاظ تئوری نیروی مخالف دو برابر میزان کشش مطلوب وب است و سیستم رقصنده موقعیت خود را در وسط مسافتی که باید بپیماید- تا زمانی که این موقعیت ادامه دارد- حفظ می کند. اگر کشش افزایش پیدا کند رقصنده به بالا حرکت می کند و با خود حسگر را به حرکت در آورده و به کنترلر سیگنال می دهد که از گشتاور بکاهد تا رقصنده امکان پیدا کند به وضعیت اولیه خود برگردد. اگر کشش کاهش پیدا کند عکس این فرایند رخ می دهد. اضافه کردن وزنه به نورد و یا کم کردن وزنه از نورد میزان کشش را تعیین می کند. با تغییر فشار هوا به یک سیلندر بارگذار براساس جدول تنظیمات که ارتباط بین فشار و کشش را نشان می دهد نیز می توان میزان کشش را تعیین کرد.
رقصنده ها از لحاظ مکانیکی پیچیده هستند و دست کم به دو نورد هرزگرد نیاز دارند که یکی قبل و دیگری بعد از نورد رقصنده قرار گرفته است. این نوردها به فضای اضافی در ماشین نیاز دارند. سیستم رقصنده ای که به خوبی طراحی شده باشد سبک است به همین خاطر به سرعت می تواند واکنش نشان دهد ولی در عین حال از استحکام بالایی برخوردار است به همین خاطر تاب برنداشته و وب را به این سو و آن سو حرکت نداده و حرکت ثابت و یکنواخت آن را تضمین می کند. مکانیزم سیستم رقصنده به گونه ای طراحی شده است که قطعات متحرک آن اصطکاک کمی ایجاد می کنند تا بتواند به سرعت در مقابل تغییرات ناچیز در کشش واکنش نشان دهد. ابزار جذب حرکت مثل فنر هرگز نباید برای ایجاد ثبات در حرکت رقصنده به کار روند زیرا باعث کاهش حساسیت و زمان واکنش آن می شوند، مشکلاتی که به سهم خود باعث افزایش نوسانات در کشش می شوند.
رقصنده معمولا هنگامی که سرعت وب از 500 فوت در دقیقه فراتر می رود در کنترل آن با مشکل مواجه می شود زیرا اصطکاک و اینرسی ذاتی رقصنده باعث کاهش حساسیت کنترلر آن می شود. کشش های ناچیز و کشش های جورواجور ومتعدد برای رقصنده ها مشکل ایجاد می کند. این بار هم اصطکاک و اینرسی عوامل اصلی هستند. نورد رقصنده در مسیر خود حرکت آونگی دارد که باعث ایجاد تغییرات در میزان کشش، طول وب و حرکت عرضی آن می شود. اگر حرکت رقصنده شدید و یک باره باشد ممکن است به انتهای مسیر خود برسد و باعث پاره شدن یا شل شدن وب شود، مشکلی که به سهم خود باعث پیچ خوردن وب می شود. این وضعیت باعث توقف کار چاپ، کوتینگ و دیگر فرآیندهایی که باید در ماشین چاپ رخ می دهد شده و بر میزان کیفیت و باطله اثر می گذارد. علاج رایج برای حل معضل نوسانات (بالا و پایین رفتن یکباره و با سرعت زیاد) رقصنده، جلوگیری از حرکت رقصنده و یا انجام عملیات به صورت دستی است. نتیجه این کار برهم زدن کنترل دستگاه است که به سهم خود باعث افزایش میزان باطله، کاهش میزان تولید و کیفیت کار چاپی می شود. سیستم های رقصنده برای سرعت های متوسط و پایین وب و نوسانات کم کشش مناسب هستند.
معایب سیستم های نورد رقصنده
رقصنده ها در واقع کنترل کننده موقعیت وب هستند و نه کنترل کننده های کشش. کشش نقش تصادفی در عملکرد این سیستم دارد. سیستم های رقصنده کشش را نه اندازه گیری کرده و نه آن را نشان می دهند. رقصنده ها برای اینکه بتوانند کار خود را انجام دهند باید حرکت کنند، به همین خاطر آنها طول وب را درمحدوده کشش خود تغییر داده و بر هم می زنند. این حرکت می تواند باعث بروز برخی مشکلات در ارتباط با کنترل کشش نامناسب شود.